Motor
These powerful 200 resolution stepper motors allow FarmBot to move precisely in the X, Y, and Z directions. Download the motor spec sheet and encoder spec sheet.




Specs
| motor resolution | 200 steps/revolution (1.8 deg/step) |
| winding type | Bipolar |
| voltage | 12V |
| current draw | 1.68A max |
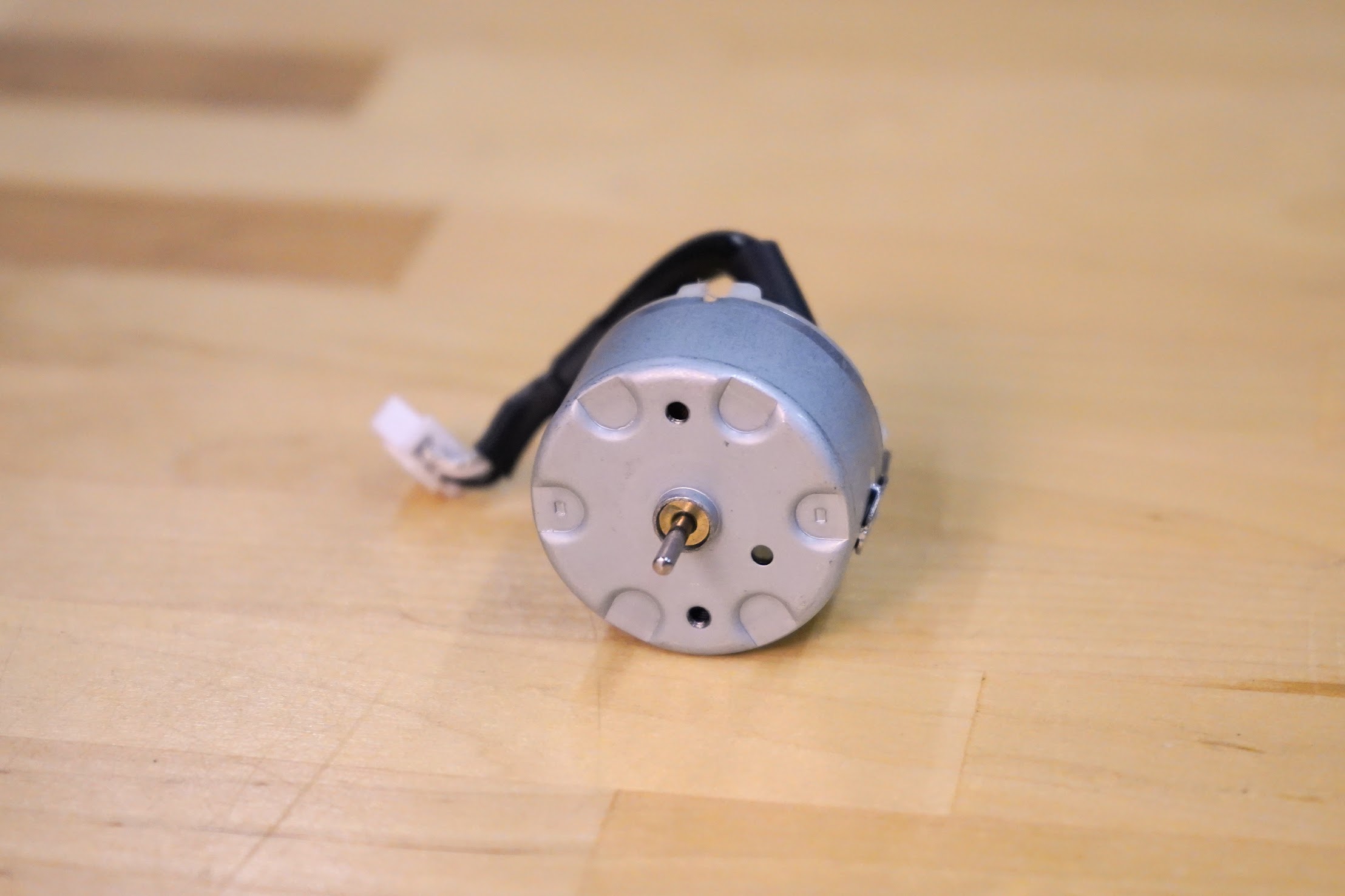
| shaft diameter | 5mm diameter |
| mount hole pattern | 4x M3 holes, standard NEMA 17 pattern |
| motor connector | 6-pin connector (only 4 pins used) |
| encoder connector | 8-pin connector |
| encoder resolution | 360 lines/revolution |
| encoder output | Differential |
| Price | $70.00 |
| Quantity |
Genesis - 4
Genesis XL - 4 |
| CAD model | Onshape |
| Purchase | The FarmBot Shop |
| internal-part-name | NEMA 17 Stepper Motor w/ Rotary Encoder |
| vendor | Motor - LDO Encoder - Honest Sensor |
| cost | $33.90 |
| notes | Logo engraving must NOT be stretched. Please send photo of first samples to verify. Insert into motor box with FarmBot logo facing DOWN. |
Component tests
| Test | Description | Target | Tolerance |
|---|---|---|---|
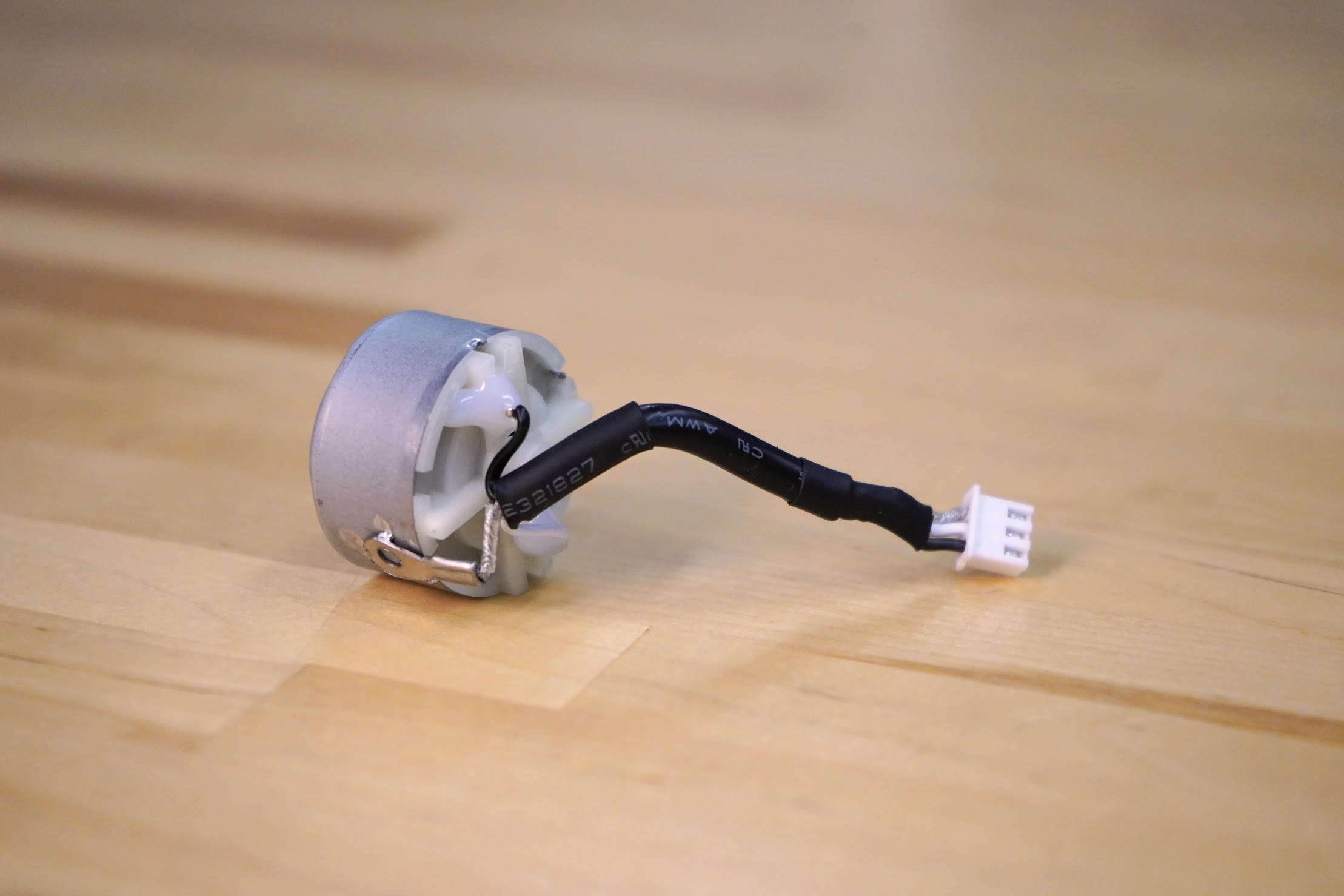
| Motor length | Measure the length of the motor body (no encoder or shaft) using digital calipers. | 47.3mm | +/- 0.5mm |
| Motor housing fit | Mount a motor to the cross-slide plate with a horizontal motor housing. Mount a motor to the z-axis motor mount and cover with the vertical motor housing. |
Motor should fit inside housing | N/A |
| Shaft | Mount a GT2 pulley onto the motor shaft according to the FarmBot system design. | Pulley should mount as expected | N/A |
| Shaft length | Measure the length of the motor shaft using digital calipers. | 22mm | +/- 0.5mm |
| Mounting holes | Mount a motor to a cross-slide plate according to the FarmBot system design. | Screws should thread into motor as expected | N/A |
| Motor operation | Connect the motor to a Farmduino and issue a movement command. | Motor should operate as expected | N/A |
| Encoder | Connect the motor and encoder to a Farmduino, issue a movement command, and inspect the encoder position in the web app. | Encoder position values should update as expected | N/A |
| Engraving | Inspect the FarmBot logo engraving. | Must not be stretched | N/A |